Biomecânica e Controle Neuromotor
Profs Drs Marco Duarte, Renato Watanabe, Daniel Boari, Reginaldo Fukuchi
Laboratório de Biomecânica e Controle Motor
Estes são alguns exemplos do que temos feito no Laboratório de Biomecânica e Controle Motor. Se você quiser saber mais,
veja mais informações em nossa página na internet, http://demotu.org:
Nós somos um laboratório de pesquisa interessado em Biomecânica e Controle Motor do movimento humano, em particular
na locomoção e postura humana. Em um sentido amplo, estamos interessados em saber como seres vivos controlam e executam
seus movimentos. Para pesquisarmos sobre o movimento dos seres humanos nós combinamos medidas experimentais
com simulação computacional.
Veja aqui uma foto em 360 graus da sala de coleta de nosso laboratório:
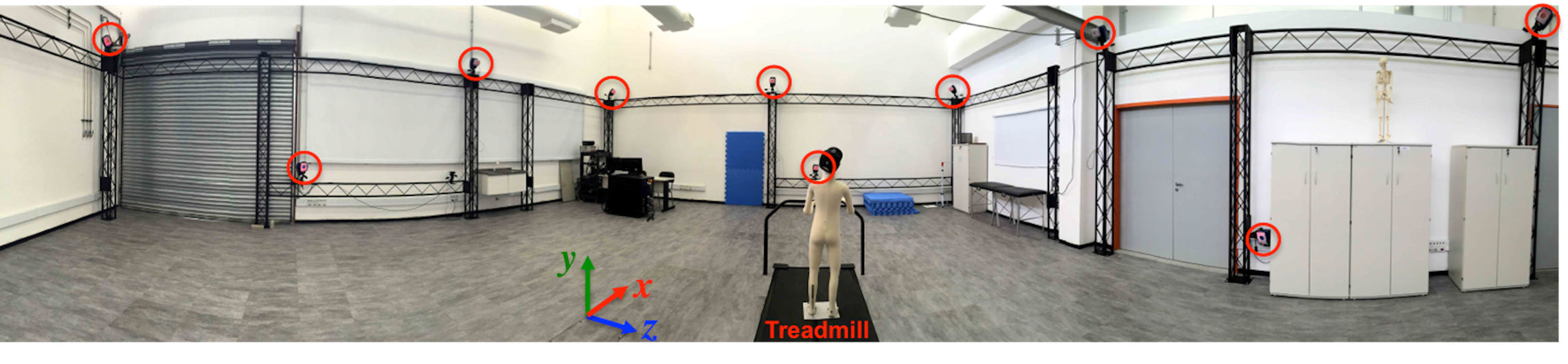
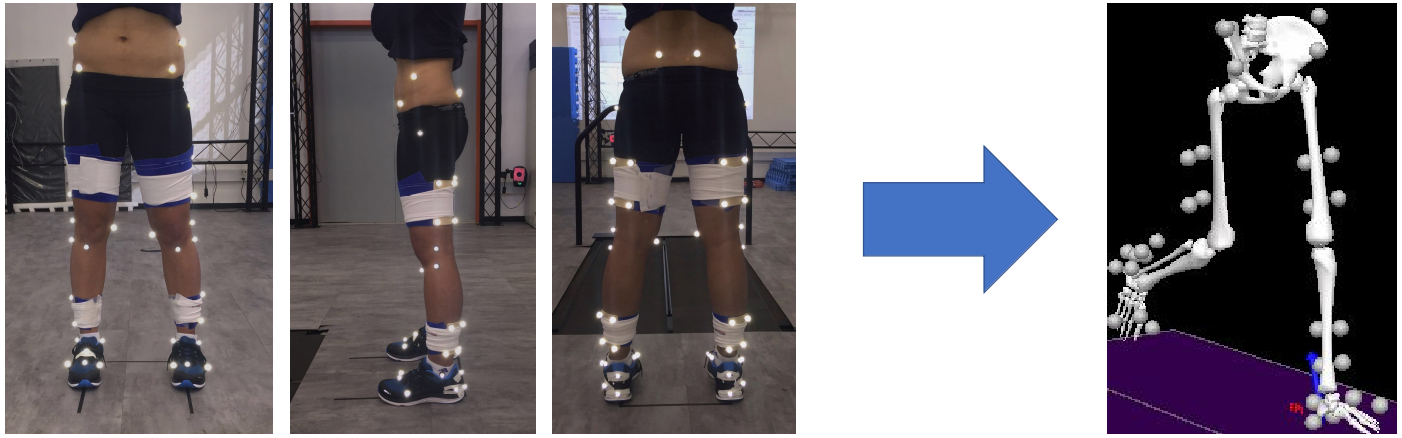
Medida do movimento do corpo
Por exemplo, para medir o movimento de cada parte do corpo, nós utilizamos um sistema de captura do movimento baseado em câmeras de vídeo e marcadores sobre o corpo da pessoa. Com estes dados e em conjunto com medidas de outros sensores, nós construímos um modelo computacional do corpo para estimar fenômenos que não podem ser medidos diretamente e assim entender melhor o que acontece com o corpo em movimento:
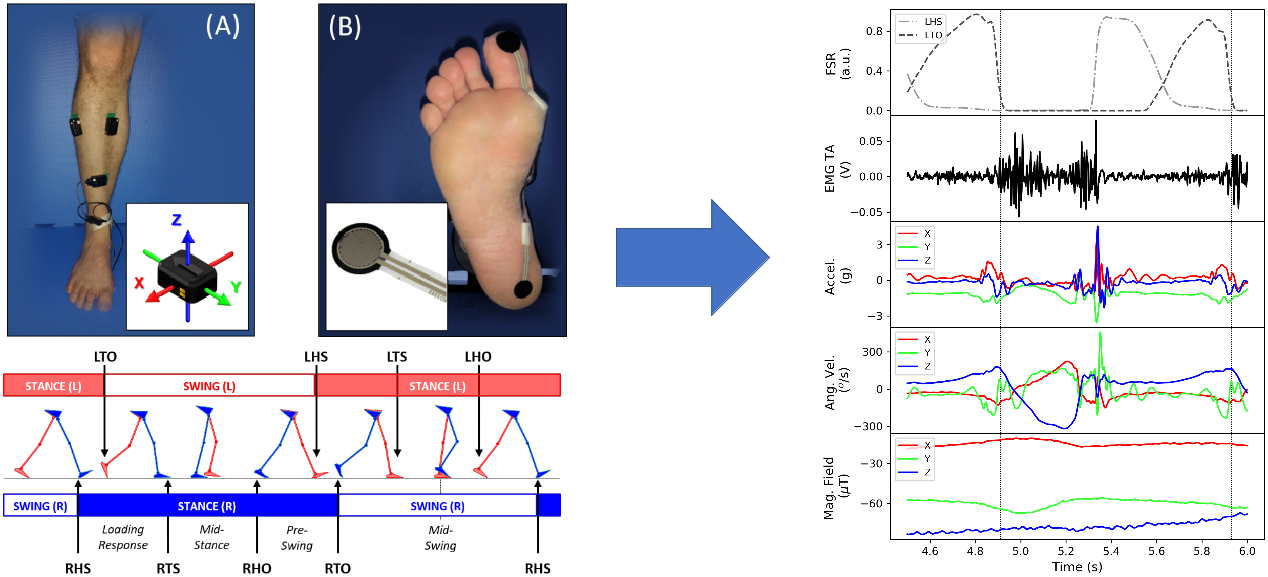
Restauração do andar
Outro exemplo do que pesquisamos é o desenvolvimento de um dispositivo para restaurar o andar de uma pessoa que tenha uma anomalia conhecida como pé caído (a pessoa não consegue flexionar o tornozelo quando está andando). Para tanto, nós medimos o movimento do corpo e atividade muscular com sensores presos ao corpo (A e B abaixo) para entender com cada fase do andar está alterada a partir dos sinais que medimos:
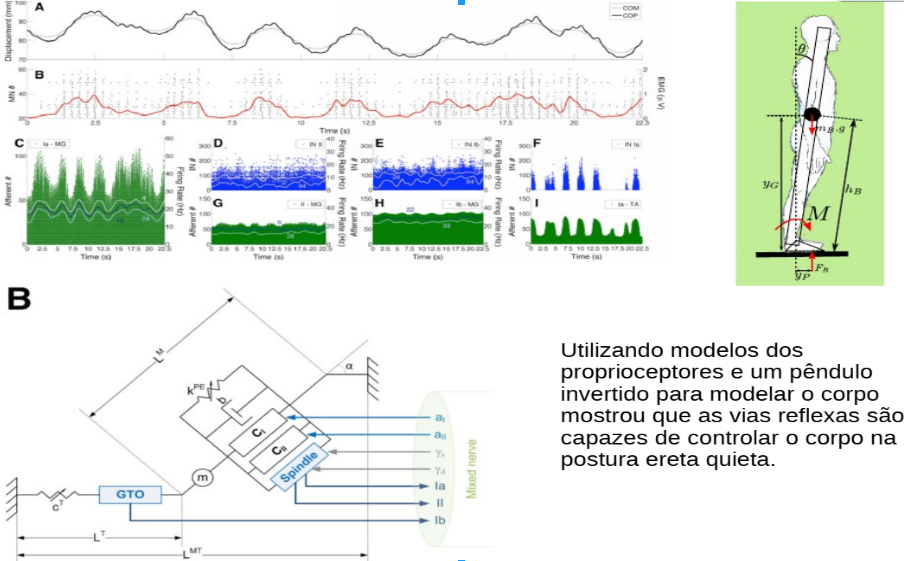
Controle Motor
Mesmo o aparente simples ato de permanecer em pé parado na verdade é uma habilidade complexa e infelizmente quedas, diretamente relacionadas a problemas em controlarmos nossos equilíbrio, é uma das principais causas de mortes acidentais na população idosa. Como seres humanos controlam o equilíbrio na postura ereta é alvo de pesquisa de diversos laboratórios no mundo inteiro.